在对无人机,平衡车,智能车,倒立摆
的学习过程中,我们可以常常听到一个比较常见的词-PID,那么PID到底是什么呢,到底它有什么作用呢?在这篇文章中我制作了一个基本的电机控制器,来探究PID的原理以及如何去使用它。
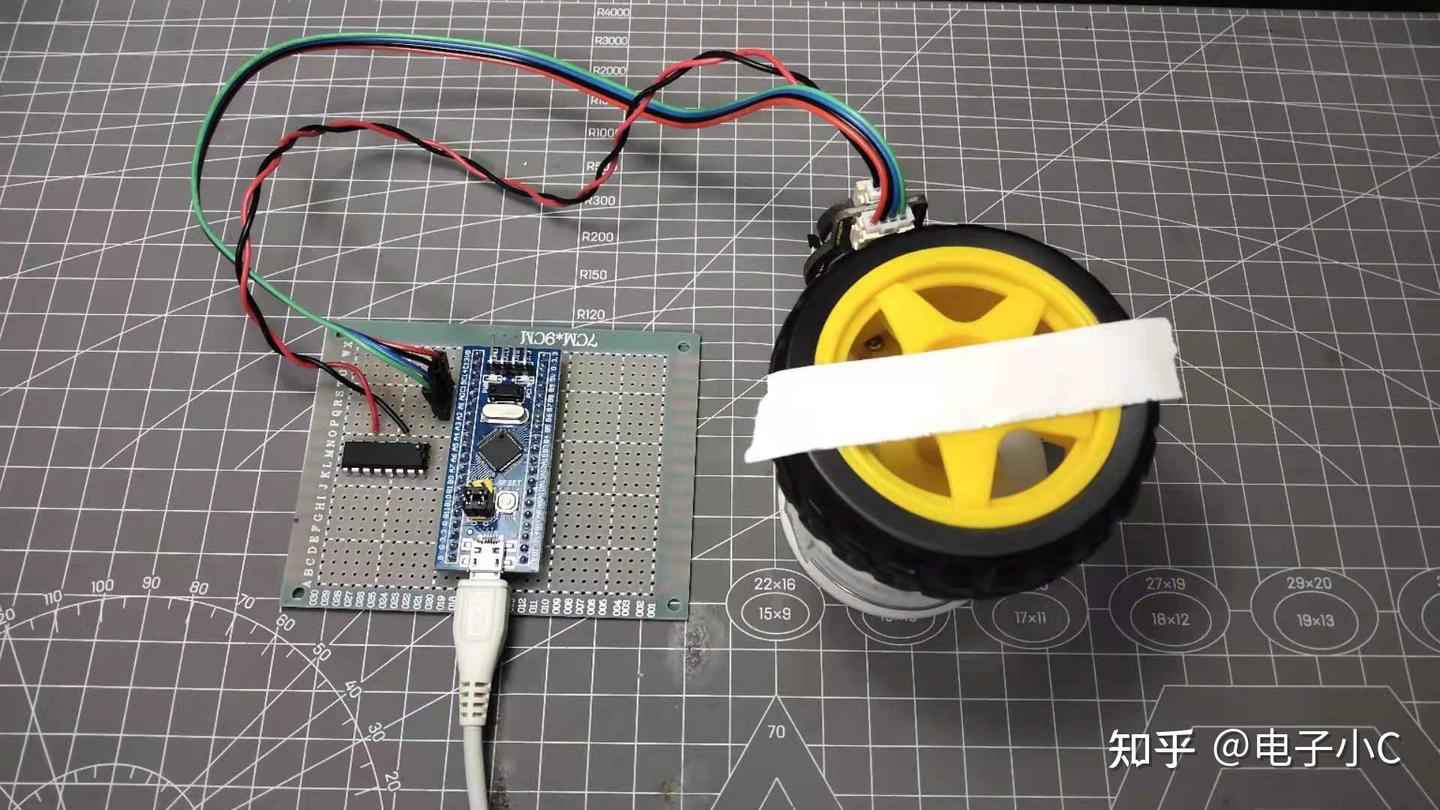
首先我们要明确一下实验的目标,就是我要可以控制我的电机旋转任意角度,在旋转的过程中,电机需要保持稳定并且不会出现震荡的情况。
电机的选择
要想完成这个实验,单片机需要对电机进行比较精确的控制,从电机那获得电机的转速以及位置等信息。所以需要使用带有编码器的直流电机,通过编码器,单片机即可获得电机的转速以及位置信息。市面上售卖的编码器电机一般分为霍尔或者光电编码器
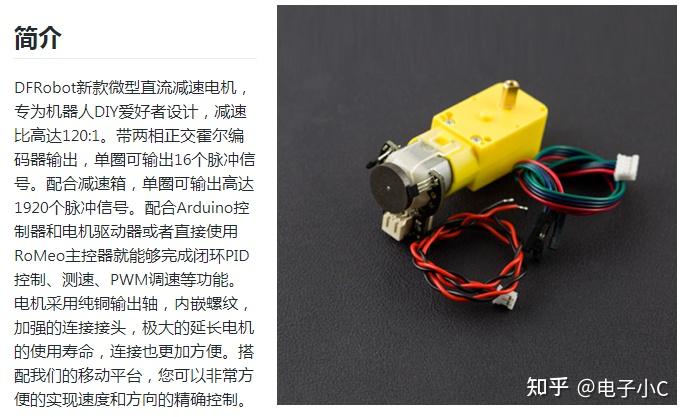
的,在这里我选择的是一款来自DFRobot减速比为120的TT编码器电机
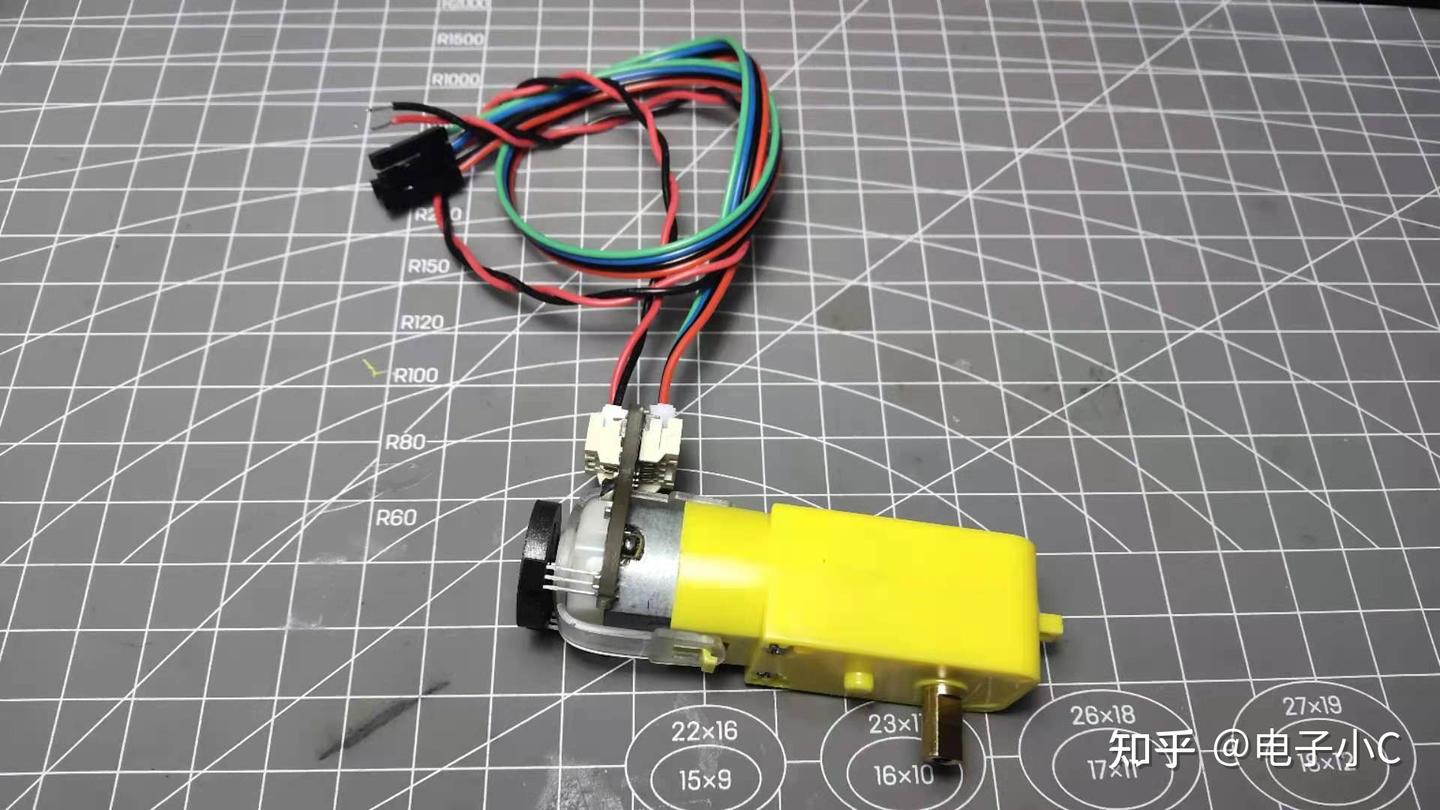
根据官网给出的数据手册,他的编码器一圈可以输出16个脉冲信号,经过减速箱后,输出轴旋转一圈可以输出16*120=1920个脉冲信号。
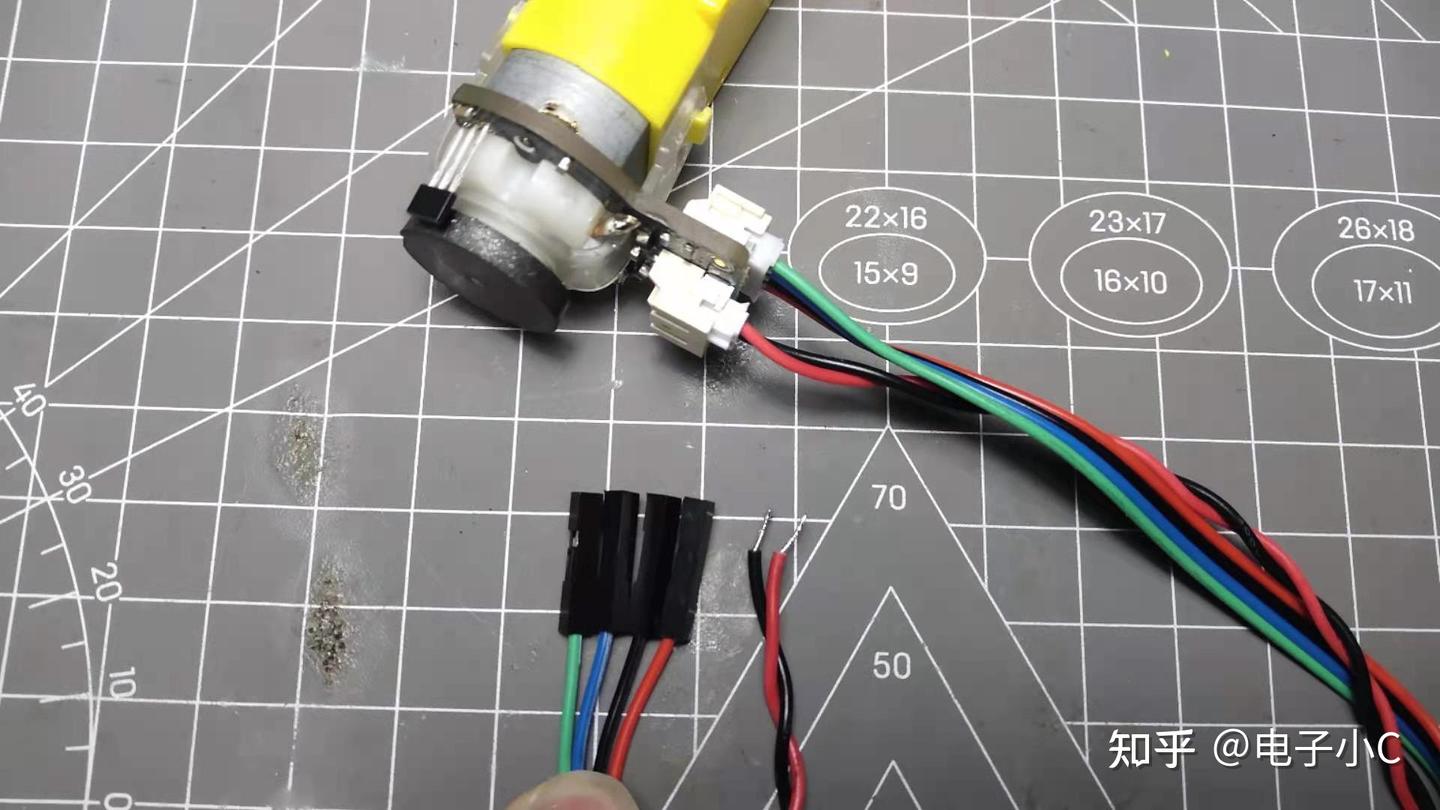
买回来的电机一共有六根线,左边4根为编码器的线,右边两根为电机的线
电机驱动芯片
电机驱动芯片我选择的是L293D,这是一个双路的H桥有刷电机驱动芯片,使用2个输入引脚以及一个使能脚就可以控制一路电机正反转
以及调速。

单片机
单片机用

文章评论